7
Supervised Learning
The (fictional) information technology company JCN Corporation is reinventing itself and changing its focus to artificial intelligence and cloud computing. As part of managing its talent during this enterprise transformation, it is conducting a machine learning project to estimate the expertise of its employees from a variety of data sources such as self-assessments of skills, work artifacts (patents, publications, software documentation, service claims, sales opportunities, etc.), internal non-private social media posts, and tabular data records including the employee’s length of service, reporting chain, and pay grade. A random subset of the employees has been explicitly evaluated on a binary yes/no scale for various AI and cloud skills, which constitute the labeled training data for machine learning. JCN Corporation’s data science team has been given the mission to predict the expertise evaluation for all the other employees in the company. For simplicity, let’s focus on only one of the expertise areas: serverless architecture.
Imagine that you are on JCN Corporation’s data science team and have progressed beyond the problem specification, data understanding, and data preparation phases of the machine learning lifecycle and are now at the modeling phase. By applying detection theory, you have chosen an appropriate quantification of performance for predicting an employee’s skill in serverless architecture: the error rate—the Bayes risk with equal costs for false positives and false negatives—introduced in Chapter 6.
It is now time to get down to the business of learning a decision function (a classifier) from the training data that generalizes well to predict expertise labels for the unlabeled employees. Deep learning is one family of classifiers that is on the tip of everyone’s tongue. It is certainly one option for you, but there are many other kinds of classifiers too. How will you evaluate different classification algorithms to select the best one for your problem?
“My experience in industry strongly confirms that deep learning is a narrow sliver of methods needed for solving complex automated decision making problems.”
—Zoubin Ghahramani, chief scientist at Uber
A very important concept in practicing machine learning, first mentioned in Chapter 2, is the no free lunch theorem. There is no one single machine learning method that is best for all datasets.[1] What is a good choice for one dataset might not be so great for another dataset. It all depends on the characteristics of the dataset and the inductive bias of the method: the assumptions on how the classifier should generalize outside the training data points. The challenge in achieving good generalization and a small error rate is protecting against overfitting (learning a model that too closely matches the idiosyncrasies of the training data) and underfitting (learning a model that does not adequately capture the patterns in the training data). The goal is to get to the Goldilocks point where things are not too hot (overfitting) and not too cold (underfitting), but just right.
An implication of the no free lunch theorem is that you must try several different methods for the JCN Corporation expertise problem and see how they perform empirically before deciding on one over another. Simply brute forcing it—training all the different methods and computing their test error to see which one is smallest—is common practice, but you decide that you want to take a more refined approach and analyze the inductive biases of different classifiers. Your analysis will determine the domains of competence of various classifiers: what types of datasets do they perform well on and what type of datasets do they perform poorly on.[2] Recall that competence or basic accuracy is the first attribute of trustworthy machine learning as well as the first half of safety.
Why would you want to take this refined approach instead of simply applying a bunch of machine learning methods from software packages such as scikit-learn, tensorflow, and pytorch without analyzing their inductive biases? First, you have heeded the admonitions from earlier chapters to be safe and to not take shortcuts. More importantly, however, you know you will later be creating new algorithms that respect the second (reliability) and third (interaction) attributes of trustworthiness. You must not only be able to apply algorithms, you must be able to analyze and evaluate them before you can create. Now go forth and analyze classifiers for inventorying expertise in the JCN Corporation workforce.
7.1 Domains of Competence
Different
classifiers work well on different datasets depending on their characteristics.[3]
But what characteristics of a dataset matter? What are the parameters of a
domain of competence? A key concept to answer those questions is the decision boundary. In Chapter 6, you learned that the
Bayes optimal decision function is a likelihood ratio test which is a threshold
of the one-dimensional likelihood ratio. If you invert the likelihood ratio,
you can go back to the feature space with ![]() feature dimensions
feature dimensions
![]() and trace out surfaces
to which that single threshold value maps. The collection of these surfaces is
a level set of the likelihood ratio function and is
known as the decision boundary. Imagine the likelihood ratio function being
like the topography and bathymetry of the Earth. Anything underwater receives
the classification
and trace out surfaces
to which that single threshold value maps. The collection of these surfaces is
a level set of the likelihood ratio function and is
known as the decision boundary. Imagine the likelihood ratio function being
like the topography and bathymetry of the Earth. Anything underwater receives
the classification ![]() (employee is
unskilled in serverless architecture) and anything above water receives the
classification
(employee is
unskilled in serverless architecture) and anything above water receives the
classification ![]() (employee is
skilled in serverless architecture). Sea level is the threshold value and the
coastline is the level set or decision boundary. An example of a decision
boundary for a two-dimensional feature space is shown in Figure 7.1.
(employee is
skilled in serverless architecture). Sea level is the threshold value and the
coastline is the level set or decision boundary. An example of a decision
boundary for a two-dimensional feature space is shown in Figure 7.1.
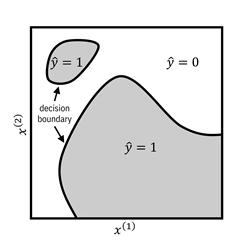
Figure 7.1. An example of a decision boundary in a feature
space. The gray regions correspond to feature values for which the decision
function predicts employees are skilled in serverless architecture. The white
regions correspond to features for which the decision function predicts
employees are unskilled in serverless architecture. The black lines are the
decision boundary. Accessible caption. A stylized plot with the first
feature dimension ![]() on the horizontal
axis and the second feature dimension
on the horizontal
axis and the second feature dimension ![]() on the vertical
axis. The space is partitioned into a couple of blob-like gray regions labeled
on the vertical
axis. The space is partitioned into a couple of blob-like gray regions labeled ![]() and a white region
labeled
and a white region
labeled ![]() . The boundary
between the regions is marked as the decision boundary. Classifier regions do
not have to be all one connected component.
. The boundary
between the regions is marked as the decision boundary. Classifier regions do
not have to be all one connected component.
Three key characteristics of a dataset determine how well the inductive biases of a classifier match the dataset:
1. overlap of data points from the two class labels near the decision boundary,
2. linearity or nonlinearity of the decision boundary, and
3. number of data points, their density, and amount of clustering.
Classifier domains of competence are defined in terms of these three considerations.[4] Importantly, domains of competence are relative notions: does one classification algorithm work better than others?[5] They are not absolute notions, because at the end of the day, the absolute performance is limited by the Bayes optimal risk defined in Chapter 6. For example, one classification method that you tried may work better than others on datasets with a lot of class overlap near the decision boundary, nearly linear shape of the decision boundary, and not many data points. Another classification method may work better than others on datasets without much class overlap near a tortuously-shaped decision boundary. Yet another classification method may work better than others on very large datasets. In the remainder of this chapter, you will analyze many different supervised learning algorithms. The aim is not only describing how they work, but analyzing their inductive biases and domains of competence.
7.2 Two Ways to Approach Supervised Learning
Let’s
begin by cataloging what you and the team of JCN Corporation data scientists
have at your disposal. Your training dataset consists of ![]() samples
samples ![]() independently drawn
from the probability distribution
independently drawn
from the probability distribution ![]() . The features
. The features ![]() sampled from the
random variable
sampled from the
random variable ![]() are numerical or
categorical quantities derived from skill self-assessments, work artifacts, and
so on. There are
are numerical or
categorical quantities derived from skill self-assessments, work artifacts, and
so on. There are ![]() features, so
features, so ![]() is a
is a ![]() -dimensional
vector. The labels
-dimensional
vector. The labels ![]() , sampled from the
random variable
, sampled from the
random variable ![]() are the binary
(zero or one) expertise evaluations on serverless architecture. Importantly, you
do not have access to the precise distribution
are the binary
(zero or one) expertise evaluations on serverless architecture. Importantly, you
do not have access to the precise distribution ![]() , but only to the
finite number of samples contained in the training dataset drawn from the
distribution. This is the key difference between the supervised machine
learning problem and the Bayesian detection problem introduced in Chapter 6. The
goal is the same in both the machine learning and detection problems: find a
decision function
, but only to the
finite number of samples contained in the training dataset drawn from the
distribution. This is the key difference between the supervised machine
learning problem and the Bayesian detection problem introduced in Chapter 6. The
goal is the same in both the machine learning and detection problems: find a
decision function ![]() that predicts
labels from features.
that predicts
labels from features.
What
are your options to find the classifier ![]() based on the
training data? You cannot simply minimize the Bayes risk functional or the
probability of error directly, because that would rely on full knowledge of the
probability distribution of the features and labels, which you do not have. You
and the team have two options:
based on the
training data? You cannot simply minimize the Bayes risk functional or the
probability of error directly, because that would rely on full knowledge of the
probability distribution of the features and labels, which you do not have. You
and the team have two options:
1. plug-in approach: estimate the likelihood functions and prior probabilities from the training data, and plug them into the Bayes optimal likelihood ratio test described in Chapter 6, or
2. risk minimization: optimize a classifier over an empirical approximation to the error rate computed on the training data samples.
There are specific methods within these two broad categories of supervised classification algorithms. A mental model for different ways of doing supervised machine learning is shown in Figure 7.2.
7.3 Plug-In Approach
First,
you and the rest of the JCN Corporation data science team try out plug-in
methods for supervised classification. The main idea is to use the training
data to estimate the likelihood functions ![]() and
and ![]() , and then plug
them into the likelihood ratio to obtain the classifier.
, and then plug
them into the likelihood ratio to obtain the classifier.
7.3.1 Discriminant Analysis
One
of the most straightforward plug-in methods, discriminant
analysis, assumes a parametric form for the likelihood functions and
estimates their parameters. Then just like in Chapter 6, it obtains a decision
function by taking the ratio of these likelihood functions and comparing them
to a threshold ![]() . The actual
underlying likelihood functions do not have to be exactly their assumed forms
and usually aren’t in practice. If they are somewhat close, that is good
enough. The assumed parametric form is precisely the inductive bias of
discriminant analysis.
. The actual
underlying likelihood functions do not have to be exactly their assumed forms
and usually aren’t in practice. If they are somewhat close, that is good
enough. The assumed parametric form is precisely the inductive bias of
discriminant analysis.
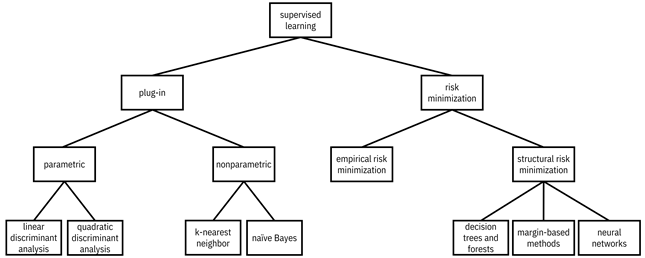
Figure 7.2. A mental model for different ways of approaching supervised machine learning. A hierarchy diagram with supervised learning at its root. Supervised learning has children plug-in and risk minimization. Plug-in has children parametric and nonparametric. Parametric has children linear discriminant analysis and quadratic discriminant analysis. Nonparametric has children k-nearest neighbor and naïve Bayes. Risk minimization has children empirical risk minimization and structural risk minimization. Structural risk minimization has children decision trees and forests, margin-based methods, and neural networks.
If
the assumed parametric form for the likelihood functions is multivariate
Gaussian in ![]() dimensions with
mean parameters
dimensions with
mean parameters ![]() and
and ![]() and covariance
matrix parameters
and covariance
matrix parameters ![]() and
and ![]() ,[6]
then the first step is to compute their empirical estimates
,[6]
then the first step is to compute their empirical estimates ![]() ,
, ![]() ,
, ![]() , and
, and ![]() from the training
data, which you know how to do from Chapter 3. The second step is to plug those
estimates into the likelihood ratio to get the classifier decision function. Under
the Gaussian assumption, the method is known as quadratic
discriminant analysis because after rearranging and simplifying the
likelihood ratio, the quantity compared to a threshold turns out to be a
quadratic function of
from the training
data, which you know how to do from Chapter 3. The second step is to plug those
estimates into the likelihood ratio to get the classifier decision function. Under
the Gaussian assumption, the method is known as quadratic
discriminant analysis because after rearranging and simplifying the
likelihood ratio, the quantity compared to a threshold turns out to be a
quadratic function of ![]() . If you further
assume that the two covariance matrices
. If you further
assume that the two covariance matrices ![]() and
and ![]() are the same
matrix
are the same
matrix ![]() , then the quantity
compared to a threshold is even simpler: it is a linear function of
, then the quantity
compared to a threshold is even simpler: it is a linear function of ![]() , and the method is
known as linear discriminant analysis.
, and the method is
known as linear discriminant analysis.
Figure
7.3 shows examples of linear and quadratic discriminant analysis classifiers in
![]() dimensions trained
on the data points shown in the figure. The red diamonds are the employees in
the training set unskilled at serverless architecture. The green squares are
the employees in the training set skilled at serverless architecture. The
domain of competence for linear and quadratic discriminant analysis is datasets
whose decision boundary is mostly linear, with a dense set of data points of
both class labels near that boundary.
dimensions trained
on the data points shown in the figure. The red diamonds are the employees in
the training set unskilled at serverless architecture. The green squares are
the employees in the training set skilled at serverless architecture. The
domain of competence for linear and quadratic discriminant analysis is datasets
whose decision boundary is mostly linear, with a dense set of data points of
both class labels near that boundary.
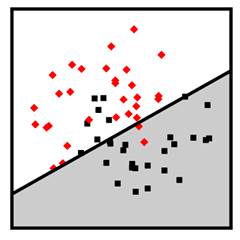
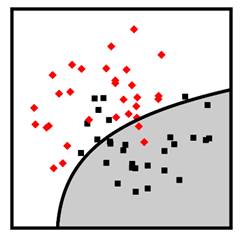
Figure 7.3. Examples of linear discriminant analysis (left) and quadratic discriminant analysis (right) classifiers. Accessible Caption. Stylized plot showing two classes of data points arranged in a noisy yin yang or interleaving moons configuration. The linear discriminant decision boundary is a straight line that cuts through the middle of the two classes. The quadratic discriminant decision boundary is a smooth curve that turns a little to enclose one of the classes.
7.3.2 Nonparametric Density Estimation
You continue your quest to analyze different classifiers for estimating the expertise of JCN employees. Instead of assuming a parametric form for the likelihood functions like in discriminant analysis, you try to estimate the likelihood functions in a nonparametric fashion. The word nonparametric is a misnomer. It does not mean that there are no parameters in the estimated likelihood function at all; it means that the number of parameters is on par with the number of training data points.
A
common way of estimating a likelihood function nonparametrically is kernel density estimation. The idea is to place a smooth
function like a Gaussian pdf centered on each of the training data points and
take the normalized sum of those functions as the estimate of the likelihood
function. In this case, the parameters are the centers of the smooth functions,
so the number of parameters equals the number of data points. Doing this for
both likelihood functions separately, taking their ratio, and comparing to a
threshold yields a valid classifier. However, it is a pretty complicated
classifier. You would need a lot of data to get a good kernel density estimate,
especially when the data has a lot of feature dimensions ![]() .
.
Instead
of doing the full density estimate, a simplification is to assume that all the
feature dimensions of ![]() are mutually
independent. Under this assumption, the likelihood functions factor into
products of one-dimensional pdfs that can be estimated separately with much
less data. If you take the ratio of these products of one-dimensional pdfs (a likelihood
ratio) and compare to a threshold, voilà, you have a naïve
Bayes classifier. The name of this method contains ‘naïve’ because it is
somewhat naïve to assume that all feature dimensions are independent—they never
are in real life. It contains ‘Bayes’ because of plugging in to the
Bayes-optimal likelihood ratio test. Often, this classifier does not outperform
other classifiers in terms of accuracy, so its domain of competence is often
non-existent.
are mutually
independent. Under this assumption, the likelihood functions factor into
products of one-dimensional pdfs that can be estimated separately with much
less data. If you take the ratio of these products of one-dimensional pdfs (a likelihood
ratio) and compare to a threshold, voilà, you have a naïve
Bayes classifier. The name of this method contains ‘naïve’ because it is
somewhat naïve to assume that all feature dimensions are independent—they never
are in real life. It contains ‘Bayes’ because of plugging in to the
Bayes-optimal likelihood ratio test. Often, this classifier does not outperform
other classifiers in terms of accuracy, so its domain of competence is often
non-existent.
A
different nonparametric method is the k-nearest neighbor
classifier. The idea behind it is very simple. Look at the labels of the ![]() closest training
data points and predict whichever label is more common in those nearby points. A
distance metric is needed to measure ‘close’ and ‘near.’ Typically, Euclidean
distance (the normal straight-line distance) is used, but other distance metrics
could be used instead. The k-nearest neighbor method works better than other
classifiers when the decision boundary is very wiggly and broken up into lots
of components, and when there is not much overlap in the classes. Figure 7.4
shows examples of naïve Bayes and k-nearest neighbor classifiers in two
dimensions. The k-nearest neighbor classifier in the figure has
closest training
data points and predict whichever label is more common in those nearby points. A
distance metric is needed to measure ‘close’ and ‘near.’ Typically, Euclidean
distance (the normal straight-line distance) is used, but other distance metrics
could be used instead. The k-nearest neighbor method works better than other
classifiers when the decision boundary is very wiggly and broken up into lots
of components, and when there is not much overlap in the classes. Figure 7.4
shows examples of naïve Bayes and k-nearest neighbor classifiers in two
dimensions. The k-nearest neighbor classifier in the figure has ![]() .
.
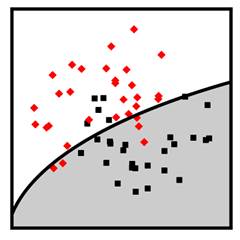
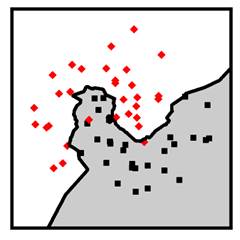
Figure 7.4. Examples of naïve Bayes (left) and k-nearest neighbor (right) classifiers. Accessible caption. Stylized plot showing two classes of data points arranged in a noisy yin yang or interleaving moons configuration. The naïve Bayes decision boundary is a smooth curve that turns a little to enclose one of the classes. The k-nearest neighbor decision boundary is very jagged and traces out the positions of the classes closely.
7.4 Risk Minimization Basics
You and the JCN team have tried out a few plug-in methods for your task of predicting which employees are skilled in serverless architecture and are ready to move on to a different category of machine learning methods: risk minimization. Whereas plug-in methods take one step back from the Bayes-optimal likelihood ratio test by estimating the likelihood functions from data, risk minimization takes two steps back and directly tries to find decision functions or decision boundaries that minimize an estimate of the Bayes risk.
7.4.1 Empirical Risk Minimization
Remember
from Chapter 6 that the probability of error ![]() , the special case
of the Bayes risk with equal costs that you’ve chosen as the performance metric,
is:
, the special case
of the Bayes risk with equal costs that you’ve chosen as the performance metric,
is:
![]()
Equation 7.1
The
prior probabilities of the class labels ![]() and
and ![]() multiply the
probabilities of the events when the decision function is wrong
multiply the
probabilities of the events when the decision function is wrong ![]() and
and ![]() . You cannot
directly compute the error probability because you do not have access to the
full underlying probability distribution. But is there an approximation to the
error probability that you can compute using the training data?
. You cannot
directly compute the error probability because you do not have access to the
full underlying probability distribution. But is there an approximation to the
error probability that you can compute using the training data?
First,
because the training data is sampled i.i.d. from the underlying distribution,
the proportion of employees in the training data set skilled and unskilled at
serverless architecture will approximately match the prior probabilities ![]() and
and ![]() , so you do not
have to worry about them explicitly. Second, the probabilities of both the
false positive event
, so you do not
have to worry about them explicitly. Second, the probabilities of both the
false positive event ![]() and false negative
event
and false negative
event ![]() event can be
expressed collectively as
event can be
expressed collectively as ![]() , which corresponds
to
, which corresponds
to ![]() for training data
samples. The zero-one loss function
for training data
samples. The zero-one loss function ![]() captures this by
returning the value
captures this by
returning the value ![]() for
for ![]() and the value
and the value ![]() for
for ![]() . Putting all these
things together, the empirical approximation to the error probability, known as
the empirical risk
. Putting all these
things together, the empirical approximation to the error probability, known as
the empirical risk ![]() , is:
, is:
Equation 7.2
Minimizing
the empirical risk over all possible decision functions ![]() is a possible
classification algorithm, but not one that you and the other JCN Corporation data
scientists evaluate just yet. Let’s understand why not.
is a possible
classification algorithm, but not one that you and the other JCN Corporation data
scientists evaluate just yet. Let’s understand why not.
7.4.2 Structural Risk Minimization
Without
any constraints, you can find a decision function that brings the empirical
risk to zero but does not generalize well to new unseen data points. At the
extreme, think about a classifier that memorizes the training data points and gets
them perfectly correct, but always predicts ![]() (unskilled at
serverless architecture) everywhere else. This is not the desired behavior—the
classifier has overfit. So just minimizing the empirical risk does not yield a
competent classifier. This memorizing classifier is pretty complex. There’s
nothing smooth or simple about it because it has as many discontinuities as
there are training set employees skilled at serverless architecture.
(unskilled at
serverless architecture) everywhere else. This is not the desired behavior—the
classifier has overfit. So just minimizing the empirical risk does not yield a
competent classifier. This memorizing classifier is pretty complex. There’s
nothing smooth or simple about it because it has as many discontinuities as
there are training set employees skilled at serverless architecture.
Constraining
the complexity of the classifier forces it to not overfit. To be a bit more
precise, if you constrain the decision function ![]() to be an element
of some class of functions or hypothesis space
to be an element
of some class of functions or hypothesis space ![]() that only includes
low-complexity functions, then you will prevent overfitting. But you can go too
far with the constraints as well. If the hypothesis space is too small and does
not contain any functions with the capacity to capture the important patterns
in the data, it may underfit the data and not generalize either. It is
important to control the hypothesis space to be just right. This idea is known
as the structural risk minimization principle.
that only includes
low-complexity functions, then you will prevent overfitting. But you can go too
far with the constraints as well. If the hypothesis space is too small and does
not contain any functions with the capacity to capture the important patterns
in the data, it may underfit the data and not generalize either. It is
important to control the hypothesis space to be just right. This idea is known
as the structural risk minimization principle.
Figure
7.5 shows the idea in pictorial form using a sequence of nested hypothesis
spaces ![]() . As an example of
nested hypothesis spaces,
. As an example of
nested hypothesis spaces, ![]() could be all
constant functions,
could be all
constant functions, ![]() could be all linear
functions,
could be all linear
functions, ![]() could be all
quadratic functions, and
could be all
quadratic functions, and ![]() could be all
polynomial functions.
could be all
polynomial functions. ![]() contains the least
complex
contains the least
complex ![]() functions while
functions while ![]() also contains more
complex
also contains more
complex ![]() functions.
functions. ![]() underfits as it
has large values for both the empirical risk
underfits as it
has large values for both the empirical risk ![]() calculated on the
training data and the probability of error
calculated on the
training data and the probability of error ![]() , which measures
generalization.
, which measures
generalization. ![]() overfits as it has
zero
overfits as it has
zero ![]() and a large value
for
and a large value
for ![]() .
. ![]() achieves a good
balance and is just right.
achieves a good
balance and is just right.
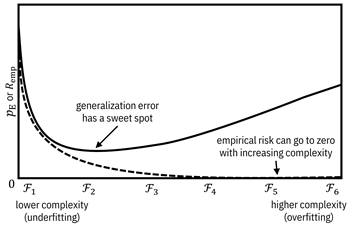
Figure 7.5. Illustration of the structural risk
minimization principle. Accessible caption. A plot with ![]() or
or ![]() on the vertical
axis and increasing complexity of hypothesis spaces on the horizontal axis. The
empirical risk decreases all the way to zero with increasing complexity. The
generalization error first decreases and then increases. It has a sweet spot in
the middle.
on the vertical
axis and increasing complexity of hypothesis spaces on the horizontal axis. The
empirical risk decreases all the way to zero with increasing complexity. The
generalization error first decreases and then increases. It has a sweet spot in
the middle.
The
hypothesis space ![]() is the inductive
bias of the classifier. Thus, within the paradigm of the structural risk
minimization principle, different choices of hypothesis spaces yield different domains
of competence. In the next section, you and your team of JCN data scientists
analyze several different risk minimization classifiers popularly used in
practice, including decision trees and forests, margin-based classifiers (logistic
regression, support vector machines, etc.), and neural networks.
is the inductive
bias of the classifier. Thus, within the paradigm of the structural risk
minimization principle, different choices of hypothesis spaces yield different domains
of competence. In the next section, you and your team of JCN data scientists
analyze several different risk minimization classifiers popularly used in
practice, including decision trees and forests, margin-based classifiers (logistic
regression, support vector machines, etc.), and neural networks.
7.5 Risk Minimization Algorithms
You
are now analyzing the competence of some of the most popular classifiers used
today that fit into the risk minimization paradigm. The basic problem is to
find the function ![]() within the
hypothesis space
within the
hypothesis space ![]() that minimizes the
average loss function
that minimizes the
average loss function ![]() :
:
Equation 7.3
This
equation may look familiar because it is similar to the Bayesian detection
problem in Chapter 6. The function in the hypothesis space that minimizes the
sum of the losses on the training data is ![]() . Different methods
have different hypothesis spaces
. Different methods
have different hypothesis spaces ![]() and different loss
functions
and different loss
functions ![]() . An alternative way
to control the complexity of the classifier is not through changing the hypothesis
space
. An alternative way
to control the complexity of the classifier is not through changing the hypothesis
space ![]() , but through a complexity
penalty or regularization term
, but through a complexity
penalty or regularization term ![]() weighted by a regularization parameter
weighted by a regularization parameter ![]() :
:
Equation 7.4
The choice of
regularization term ![]() also yields an
inductive bias for you to analyze.
also yields an
inductive bias for you to analyze.
7.5.1 Decision Trees and Forests
One of the simplest hypothesis spaces is the set of decision stumps or one-rules. These classifiers create a single split along a single feature dimension like a numerical expertise self-assessment feature or a length of service feature. Any data point whose value is on one side of a threshold gets classified as skilled in serverless architecture, and on the other side as unskilled in serverless architecture. For categorical features, a split is just a partitioning of the values into two groups. The other features besides the one participating in the decision stump can be anything. An example of a decision stump is shown in Figure 7.6 as a node with two branches and also through its decision boundary.
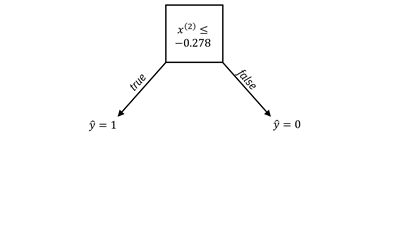
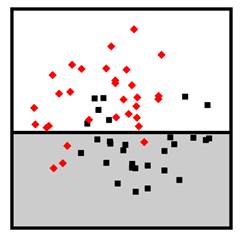
Figure 7.6. An example of a decision stump classifier. Accessible
caption. On the left is a decision node ![]() . When it is true,
. When it is true, ![]() and when it is
false,
and when it is
false, ![]() . On the right is a
stylized plot showing two classes of data points arranged in a noisy yin yang
or interleaving moons configuration. The decision boundary is a horizontal
line.
. On the right is a
stylized plot showing two classes of data points arranged in a noisy yin yang
or interleaving moons configuration. The decision boundary is a horizontal
line.
The hypothesis space of decision trees includes decision functions with more complexity than decision stumps. A decision tree is created by splitting on single feature dimensions within each branch of the decision stump, splitting within those splits, and so on. An example of a decision tree with two levels is shown in Figure 7.7. Decision trees can go much deeper than two levels to create fairly complex decision boundaries. An example of a complex decision boundary from a decision tree classifier is shown in Figure 7.8.
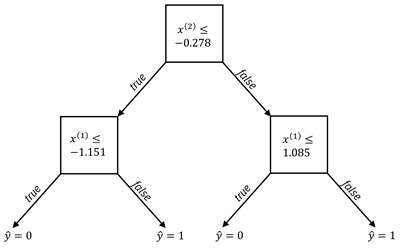
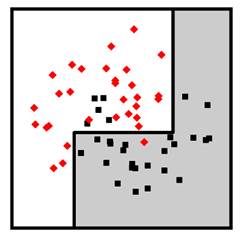
Figure 7.7. An example of a two-level decision tree classifier.
Accessible caption. On the left is a decision node ![]() . When it is true,
there is another decision node
. When it is true,
there is another decision node ![]() . When this
decision node is true,
. When this
decision node is true, ![]() and when it is
false,
and when it is
false, ![]() When the top
decision node is false, there is another decision node
When the top
decision node is false, there is another decision node ![]() . When this
decision node is true,
. When this
decision node is true, ![]() and when it is
false,
and when it is
false, ![]() On the right is a
stylized plot showing two classes of data points arranged in a noisy yin yang
or interleaving moons configuration. The decision boundary is a made up of
three line segments: the first segment is vertical, it turns right into a
horizontal segment, and then up into another vertical segment.
On the right is a
stylized plot showing two classes of data points arranged in a noisy yin yang
or interleaving moons configuration. The decision boundary is a made up of
three line segments: the first segment is vertical, it turns right into a
horizontal segment, and then up into another vertical segment.
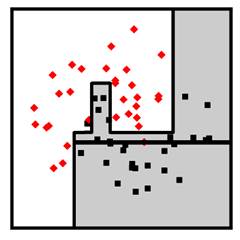
Figure 7.8. An example decision tree classifier with many levels. Accessible caption. A stylized plot showing two classes of data points arranged in a noisy yin yang or interleaving moons configuration. The decision boundary is a made up of several vertical and horizontal segments.
The hypothesis space of decision forests is made up of ensembles of decision trees that vote for their prediction, possibly with an unequal weighting given to different trees. The weighted majority vote from the decision trees is the overall classification. The mental model for a decision forest is illustrated in Figure 7.9 and an example decision boundary is given in Figure 7.10.
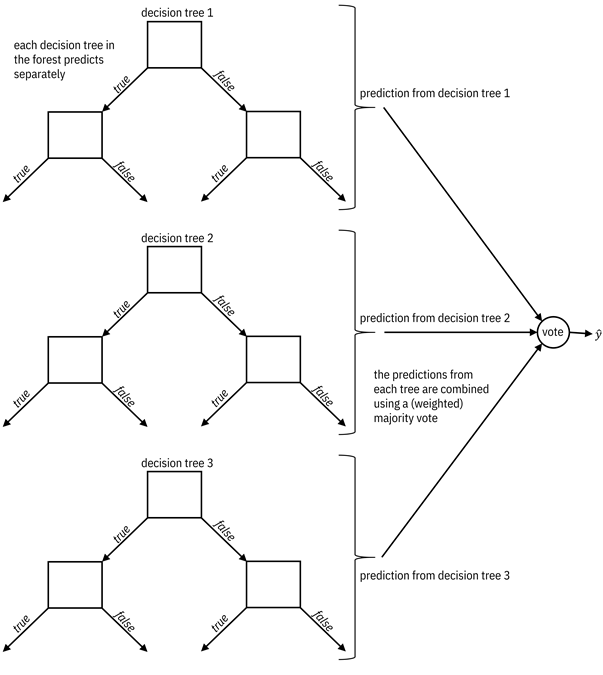
Figure 7.9. A mental model for a decision forest. Accessible
caption. Three individual decision trees each predict separately. Their
predictions feed into a vote node which outputs ![]() . The predictions
from each tree are combined using a (weighted) majority vote.
. The predictions
from each tree are combined using a (weighted) majority vote.
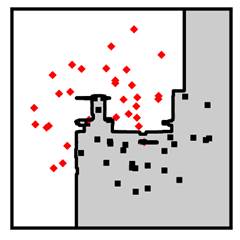
Figure 7.10. An example decision forest classifier. Accessible caption. Stylized plot showing two classes of data points arranged in a noisy yin yang or interleaving moons configuration. The decision boundary is fairly jagged with mostly axis-aligned segments and traces out the positions of the classes closely.
Decision stumps and decision trees can be directly optimized for the zero-one loss function that appears in the empirical risk.[7] More commonly, however, greedy heuristic methods are employed for learning decision trees in which the split for each node is done one at a time, starting from the root and progressing to the leaves. The split is chosen so that each branch is as pure as can be for the two classes: mostly just employees skilled at serverless architecture on one side of the split, and mostly just employees unskilled at serverless architecture on the other side of the split. The purity can be quantified by two different information-theoretic measures, information gain and Gini index, which were introduced in Chapter 3. Two decision tree algorithms are popularly-used: the C5.0 decision tree that uses information gain as its splitting criterion, and the classification and regression tree (CART) that uses Gini index as its splitting criterion. The depth of decision trees is controlled to prevent overfitting. The domain of competence of C5.0 and CART decision trees is tabular datasets in which the phenomena represented in the features tend to have threshold and clustering behaviors without much class overlap.
Decision forests are made up of a lot of decision trees. C5.0 or CART trees are usually used as these base classifiers. There are two popular ways to train decision forests: bagging and boosting. In bagging, different subsets of the training data are presented to different trees and each tree is trained separately. All trees have equal weight in the majority vote. In boosting, a sequential procedure is followed. The first tree is trained in the standard manner. The second tree is trained to focus on the training samples that the first tree got wrong. The third tree focuses on the errors of the first two trees, and so on. Earlier trees receive greater weight. Decision forests have good competence because of the diversity of their base classifiers. As long as the individual trees are somewhat competent, any unique mistake that any one tree makes is washed out by the others for an overall improvement in generalization.
The random forest classifier is the most popular bagged decision forest and the XGBoost classifier is the most popular boosted decision forest. Both have very large domains of competence. They are robust and work extremely well for almost all kinds of structured datasets. They are the first-choice algorithms for practicing data scientists to achieve good accuracy models with little to no tuning of parameters.
7.5.2 Margin-Based Methods
Margin-based classifiers constitute another popular family of supervised learning algorithms. This family includes logistic regression and support vector machines (SVMs). The hypothesis space of margin-based classifiers is more complex than decision stumps, but in a different way than decision trees. Margin-based classifiers allow any linear decision boundary rather than only ones parallel to single feature dimensions. Going even further, margin-based classifiers can have nonlinear decision boundaries in the original feature space by applying nonlinear functions to the features and finding linear decision boundaries in that transformed space.[8]
The
main concept of these algorithms is the margin, the
distance of data points to the decision boundary. With a linear decision
boundary, the form of the classifier is ![]() [9] where
[9] where ![]() is a weight vector or coefficient vector
that is learned from the training data. The absolute value of
is a weight vector or coefficient vector
that is learned from the training data. The absolute value of ![]() is the distance of
the data point to the decision boundary and is thus the margin of the point.
The quantity
is the distance of
the data point to the decision boundary and is thus the margin of the point.
The quantity ![]() is positive if
is positive if ![]() is on one side of
the hyperplane defined by
is on one side of
the hyperplane defined by ![]() and negative if
and negative if ![]() is on the other
side. The
is on the other
side. The ![]() function gives a classification
of
function gives a classification
of ![]() (unskilled at
serverless architecture) for negative margin and a classification of
(unskilled at
serverless architecture) for negative margin and a classification of ![]() (skilled at
serverless architecture) for positive margin. The stuff with the
(skilled at
serverless architecture) for positive margin. The stuff with the ![]() function (adding
one and dividing by two) is just a way to recreate the behavior of the
function (adding
one and dividing by two) is just a way to recreate the behavior of the ![]() function.
function.
Surrogates
for the zero-one loss function ![]() are used in the
risk minimization problem. Instead of taking two arguments, these margin-based loss
functions take the single argument
are used in the
risk minimization problem. Instead of taking two arguments, these margin-based loss
functions take the single argument ![]() . When
. When ![]() is multiplied by
is multiplied by ![]() , the result is
positive for a correct classification and negative for an incorrect
classification.[10]
The loss is large for negative inputs and small or zero for positive inputs. In
logistic regression, the loss function is the logistic loss:
, the result is
positive for a correct classification and negative for an incorrect
classification.[10]
The loss is large for negative inputs and small or zero for positive inputs. In
logistic regression, the loss function is the logistic loss: ![]() and in SVMs, the
loss function is the hinge loss:
and in SVMs, the
loss function is the hinge loss: ![]() . The shape of
these loss function curves is shown in Figure 7.11.
. The shape of
these loss function curves is shown in Figure 7.11.
The
regularization term ![]() for the standard
forms of logistic regression and SVMs is
for the standard
forms of logistic regression and SVMs is ![]() , the
length-squared of the coefficient vector (also known as the
, the
length-squared of the coefficient vector (also known as the ![]() -norm squared). The
loss function, regularization term, and nonlinear feature mapping together
constitute the inductive bias of the classifier. An alternative regularization
term is the sum of the absolute values of the coefficients in
-norm squared). The
loss function, regularization term, and nonlinear feature mapping together
constitute the inductive bias of the classifier. An alternative regularization
term is the sum of the absolute values of the coefficients in ![]() (also known as the
(also known as the ![]() -norm), which
provides the inductive bias for
-norm), which
provides the inductive bias for ![]() to have many
zero-valued coefficients. Example linear and nonlinear logistic regression and
SVM classifiers are shown in Figure 7.12. The domain of competence for
margin-based classifiers is fairly broad: structured datasets of moderate size.
SVMs work a little better than logistic regression when the features are noisy.
to have many
zero-valued coefficients. Example linear and nonlinear logistic regression and
SVM classifiers are shown in Figure 7.12. The domain of competence for
margin-based classifiers is fairly broad: structured datasets of moderate size.
SVMs work a little better than logistic regression when the features are noisy.
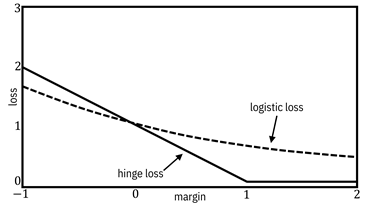
Figure 7.11. Margin-based loss functions. Accessible
caption. A plot with loss on the vertical axis and margin on the horizontal
axis. The logistic loss decreases smoothly. The hinge loss decreases linearly
until the point ![]() , after which it is
, after which it is
![]() for all larger
values of the margin.
for all larger
values of the margin.
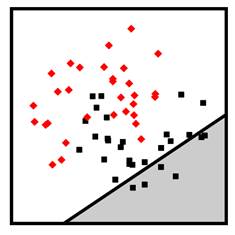
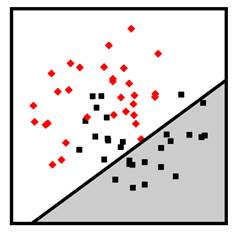
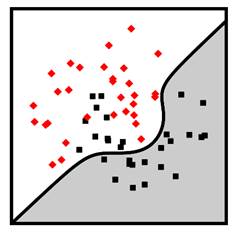
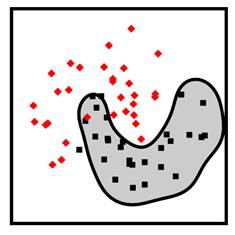
Figure 7.12. Example linear logistic regression (top left), linear SVM (top right), nonlinear polynomial SVM (bottom left), and nonlinear radial basis function SVM (bottom right) classifiers. Accessible caption. Stylized plot showing two classes of data points arranged in a noisy yin yang or interleaving moons configuration. The linear logistic regression and linear SVM decision boundaries are diagonal lines through the middle of the moons. The polynomial SVM decision boundary is a diagonal line with a smooth bump to better follow the classes. The radial basis function SVM decision boundary smoothly encircles one of the classes with a blob-like region.
7.5.3 Neural Networks
The final family of classifiers that you and the other JCN Corporation data scientists analyze is artificial neural networks. Neural networks are all the rage these days because of their superlative performance on high-profile tasks involving large-scale semi-structured datasets (image classification, speech recognition, natural language processing, bioinformatics, etc.), which is their domain of competence. The hypothesis space of neural networks includes functions that are compositions of compositions of compositions of simple functions known as neurons. The best way to understand the hypothesis space is graphically as layers of neurons, represented as nodes, connected to each other by weighted edges. There are three types of layers: an input layer, possibly several hidden layers, and an output layer. The basic picture to keep in mind is shown in Figure 7.13. The term deep learning which is bandied about quite a bit these days refers to deep neural networks: architectures of neurons with many many hidden layers.
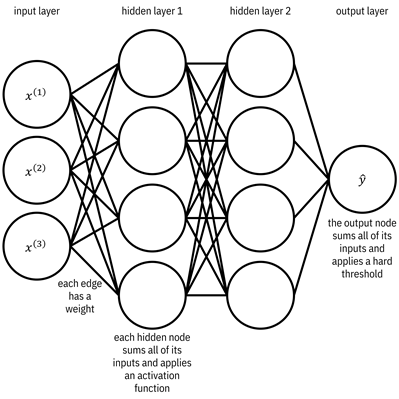
Figure 7.13. Diagram of a neural network. Accessible
caption. Three nodes on the left form the input layer. They are labeled ![]() ,
, ![]() , and
, and ![]() To the right of
the input layer is hidden layer 1 with four nodes. To the right of hidden layer
1 is hidden layer 2 with four hidden nodes. To the right of hidden layer 2 is
one node labeled
To the right of
the input layer is hidden layer 1 with four nodes. To the right of hidden layer
1 is hidden layer 2 with four hidden nodes. To the right of hidden layer 2 is
one node labeled ![]() constituting the
output layer. There are edges between each node of one layer and each node of
the adjacent layer. Each edge has a weight. Each hidden node sums all of its
inputs and applies an activation function. The output node sums all of its
inputs and applies a hard threshold.
constituting the
output layer. There are edges between each node of one layer and each node of
the adjacent layer. Each edge has a weight. Each hidden node sums all of its
inputs and applies an activation function. The output node sums all of its
inputs and applies a hard threshold.
Logistic
regression is actually a very simple neural network with just an input layer
and an output node, so let’s start there. The input layer is simply a set of
nodes, one for each of the ![]() feature dimensions
feature dimensions
![]() relevant for
predicting the expertise of employees. They have weighted edges coming out of
them, going into the output node. The weights on the edges are the coefficients
in
relevant for
predicting the expertise of employees. They have weighted edges coming out of
them, going into the output node. The weights on the edges are the coefficients
in ![]() , i.e.
, i.e. ![]() . The output node
sums the weighted inputs, so computes
. The output node
sums the weighted inputs, so computes ![]() , and then passes
the sum through the
, and then passes
the sum through the ![]() function. This
overall procedure is exactly the same as logistic regression described earlier,
but described in a graphical way.
function. This
overall procedure is exactly the same as logistic regression described earlier,
but described in a graphical way.
In
the regular case of a neural network with one or more hidden layers, nodes in
the hidden layers also start with a weighted summation. However, instead of following
the summation with an abrupt ![]() function, hidden
layer nodes use softer, more gently changing activation
functions. A few different activation functions are used in practice,
whose choice contributes to the inductive bias. Two examples, the sigmoid or
logistic activation function
function, hidden
layer nodes use softer, more gently changing activation
functions. A few different activation functions are used in practice,
whose choice contributes to the inductive bias. Two examples, the sigmoid or
logistic activation function ![]() and the rectified
linear unit (ReLU) activation function
and the rectified
linear unit (ReLU) activation function ![]() , are shown in Figure
7.14. The ReLU activation is typically used in all hidden layers of deep neural
networks because it has favorable properties for optimization techniques that
involve the gradient of the activation function.
, are shown in Figure
7.14. The ReLU activation is typically used in all hidden layers of deep neural
networks because it has favorable properties for optimization techniques that
involve the gradient of the activation function.
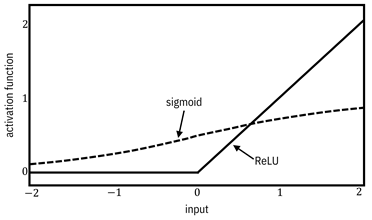
Figure 7.14. Activation functions. Accessible caption.
A plot with activation function on the vertical axis and input on the
horizontal axis. The sigmoid function is a gently rolling S-shaped curve that
equals ![]() at input value
at input value ![]() , approaches
, approaches ![]() as the input goes
to negative infinity, and approaches
as the input goes
to negative infinity, and approaches ![]() as the input goes
to positive infinity. The ReLU function is
as the input goes
to positive infinity. The ReLU function is ![]() for all negative
inputs and increases linearly starting at
for all negative
inputs and increases linearly starting at ![]() .
.
When
there are several hidden layers, the outputs of nodes in one hidden layer feed
into the nodes of the next hidden layer. Thus, the neural network’s computation
is a sequence of compositions of weighted sum, activation function, weighted
sum, activation function, and so on until reaching the output layer, which
finally applies the ![]() function. The
number of nodes per hidden layer and the number of hidden layers is a design
choice for JCN Corporation’s data scientists to make.
function. The
number of nodes per hidden layer and the number of hidden layers is a design
choice for JCN Corporation’s data scientists to make.
You
and your team have analyzed the hypothesis space. Cool beans. The next thing
for you to analyze is the loss function of neural networks. Recall that
margin-based loss functions multiply the true label ![]() by the distance
by the distance ![]() (not by the
predicted label
(not by the
predicted label ![]() ), before applying the
), before applying the
![]() function. The cross-entropy loss, the most common loss function used in
neural networks, does kind of the same thing. It compares the true label
function. The cross-entropy loss, the most common loss function used in
neural networks, does kind of the same thing. It compares the true label ![]() to a soft
prediction
to a soft
prediction ![]() in the range
in the range ![]() computed in the
output node before the
computed in the
output node before the ![]() function has been
applied to it. The cross-entropy loss function is:
function has been
applied to it. The cross-entropy loss function is:
![]()
Equation 7.5
The
form of the expression comes from cross-entropy, the average information in the
true label random variable ![]() when described
using the predicted distance random variable
when described
using the predicted distance random variable ![]() , introduced in Chapter
3. Cross-entropy should be minimized because you want the description in terms
of the prediction to be matched to the ground truth. It turns out that the
cross-entropy loss is equivalent to the margin-based logistic loss function in
binary classification problems, but it is pretty involved to show it mathematically
because the margin-based loss function is a function of one variable that
multiplies the prediction and the true label, whereas the two arguments are
kept separate in cross-entropy loss.[11]
, introduced in Chapter
3. Cross-entropy should be minimized because you want the description in terms
of the prediction to be matched to the ground truth. It turns out that the
cross-entropy loss is equivalent to the margin-based logistic loss function in
binary classification problems, but it is pretty involved to show it mathematically
because the margin-based loss function is a function of one variable that
multiplies the prediction and the true label, whereas the two arguments are
kept separate in cross-entropy loss.[11]
The
last question to ask is about regularization. Although ![]() -norm,
-norm, ![]() -norm, or other
penalties can be added to the cross-entropy loss, the most common way to
regularize neural networks is dropout. The idea is
to randomly remove some nodes from the network on each iteration of an
optimization procedure during training. Dropout’s goal is somewhat similar to
bagging, but instead of creating an ensemble of several neural networks
explicitly, dropout makes each iteration appear like a different neural network
of an ensemble, which helps diversity and generalization. An example neural
network classifier with one hidden layer and ReLU activation functions is shown
in Figure 7.15. Repeating the statement from the beginning of this section, the
domain of competence for artificial neural networks is semi-structured datasets
with a large number of data points.
-norm, or other
penalties can be added to the cross-entropy loss, the most common way to
regularize neural networks is dropout. The idea is
to randomly remove some nodes from the network on each iteration of an
optimization procedure during training. Dropout’s goal is somewhat similar to
bagging, but instead of creating an ensemble of several neural networks
explicitly, dropout makes each iteration appear like a different neural network
of an ensemble, which helps diversity and generalization. An example neural
network classifier with one hidden layer and ReLU activation functions is shown
in Figure 7.15. Repeating the statement from the beginning of this section, the
domain of competence for artificial neural networks is semi-structured datasets
with a large number of data points.
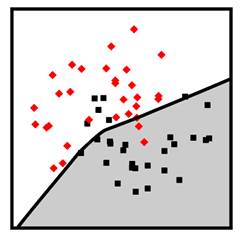
Figure 7.15. Example neural network classifier. Accessible caption. Stylized plot showing two classes of data points arranged in a noisy yin yang or interleaving moons configuration. The decision boundary is mostly smooth and composed of two almost straight diagonal segments that form a slightly bent elbow in the middle of the two moons.
7.5.4 Conclusion
You have worked your way through several different kinds of classifiers to compare and contrast their domains of competence and evaluate their appropriateness for your expertise assessment prediction task. Your dataset consists of mostly structured data, is of moderate size, and has a lot of feature axis-aligned separations between employees skilled and unskilled at serverless architecture. For these reasons, you can expect that XGBoost will be a competent classifier for your problem. But you should nevertheless do some amount of empirical testing of a few different methods.
7.6 Summary
§ There are many different methods for finding decision functions from a finite number of training samples, each with their own inductive biases for how they generalize.
§ Different classifiers have different domains of competence: what kinds of datasets they have lower generalization error on than other methods.
§ Parametric and non-parametric plug-in methods (discriminant analysis, naïve Bayes, k-nearest neighbor) and risk minimization methods (decision trees and forests, margin-based methods, neural networks) all have a role to play in practical machine learning problems.
§ It is important to analyze their inductive biases and domains of competence not only to select the most appropriate method for a given problem, but also to be prepared to extend them for fairness, robustness, explainability, and other elements of trustworthiness.